Overcoming Glare and Speed Issues at Vehicle Checkpoints
Achieve 99.9% VIN extraction accuracy under extreme desert sun and fast-moving traffic with intelligent image pre-processing.
The Enemy of Checkpoint OCR: The Environment
At high-throughput security checkpoints, border crossings, and toll booths, processing vehicles in under a second is mission-critical. However, the biggest hurdle for automated VIN scanning isn't the speed of the camera—it's the environment. Direct overhead sunlight creates blinding glare on curved windshields. Combined with harsh shadows, dust, and motion blur, standard OCR engines fail completely. They struggle to distinguish a deep scratch or a harsh reflection from the letter 'I' or the number '1', leading to massive traffic backups and security vulnerabilities.
Dynamic Glare Reduction & Sub-Second Processing
To maintain high throughput without sacrificing security, checkpoints need purpose-built computer vision. Our high-speed VIN OCR API uses advanced pre-processing algorithms to dynamically filter out glass glare, reflections, and motion blur before extraction even begins. This ensures that even under the intense desert sun, the API delivers a clean, normalized 17-character string. By integrating this into your camera systems, you can achieve seamless checkpoint automation, matching vehicles against security watchlists with sub-second latency.
Mission-Critical Use Cases
- Border Control & Customs: Instantly cross-reference physical VIN plates against stolen vehicle databases without delaying traffic.
- Secure Facility Access: Automate gate barriers for authorized fleet vehicles entering ports, military bases, or enterprise campuses.
- Smart Toll Enforcement: Serve as a secondary verification layer alongside ALPR (Automatic License Plate Recognition) to prevent plate-swapping fraud.
Live Demo: VIN Barcode Scanner
No registration required. Upload a file to test the extraction.
Drop files here or click to browse
JPG · PNG · WebP · up to 500 files · max 4.5 MB each
Ready to use this in production? Get 20 free API calls — no credit card needed.
Get 20 Free API Calls →Implementation: High-Concurrency Go Request
A high-performance Golang example designed for backend systems handling concurrent camera feeds from multiple checkpoint lanes.
Prerequisite: Go 1.18+ environment
// 🛡️ Secure your checkpoints with enterprise-grade OCR.
// 👉 Get your API key at: https://structocr.com/register
package main
import (
"bytes"
"encoding/base64"
"encoding/json"
"fmt"
"io"
"net/http"
"os"
"time"
)
type VinRequest struct {
Img string `json:"img"`
}
type VinResponse struct {
Success bool `json:"success"`
Data struct {
Vin string `json:"vin"`
Confidence string `json:"confidence"`
CarrierType string `json:"carrier_type"`
} `json:"data"`
Error string `json:"error,omitempty"`
}
func extractVIN(imagePath, apiKey string) {
// 1. Read and Base64 encode the image from the lane camera
imgData, err := os.ReadFile(imagePath)
if err != nil {
fmt.Println("[ERROR] Failed to read image:", err)
return
}
base64Img := base64.StdEncoding.EncodeToString(imgData)
// 2. Prepare the JSON payload
reqBody := VinRequest{Img: base64Img}
jsonValue, _ := json.Marshal(reqBody)
// 3. Create the HTTP request with timeout for high-speed lanes
client := &http.Client{Timeout: 3 * time.Second}
req, _ := http.NewRequest("POST", "https://api.structocr.com/v1/vin", bytes.NewBuffer(jsonValue))
req.Header.Set("x-api-key", apiKey)
req.Header.Set("Content-Type", "application/json")
// 4. Execute and parse the response
resp, err := client.Do(req)
if err != nil {
fmt.Println("[ERROR] Network timeout/failure:", err)
return
}
defer resp.Body.Close()
bodyBytes, _ := io.ReadAll(resp.Body)
var result VinResponse
json.Unmarshal(bodyBytes, &result)
if result.Success {
fmt.Printf("[ACCESS GRANTED] VIN Detected: %s (Confidence: %s)\n", result.Data.Vin, result.Data.Confidence)
} else {
fmt.Printf("[MANUAL REVIEW REQUIRED] OCR Failed: %s\n", result.Error)
}
}
func main() {
// Simulating a trigger from Lane Camera 1
extractVIN("lane1_windshield_glare.jpg", "YOUR_API_KEY")
}Technical Specs
- •Pre-processing: Adaptive Histogram Equalization & Glare Filtering
- •Throughput: Designed for highly concurrent API calls
- •Format Support: Reads dot-matrix (stippled) chassis numbers
- •Latency: Sub-second extraction per lane
- •Uptime: 99.99% Edge Network Availability
Key Features
- •Reflection Immunity: Our models are trained to ignore the reflection of the sky, trees, or the dashboard on curved glass.
- •Shadow Penetration: Extracts deep-stamped chassis VINs even in low-light undercarriage inspections.
- •No Regex Required: API handles the messy logic, returning only the cleaned 17-character standard string.
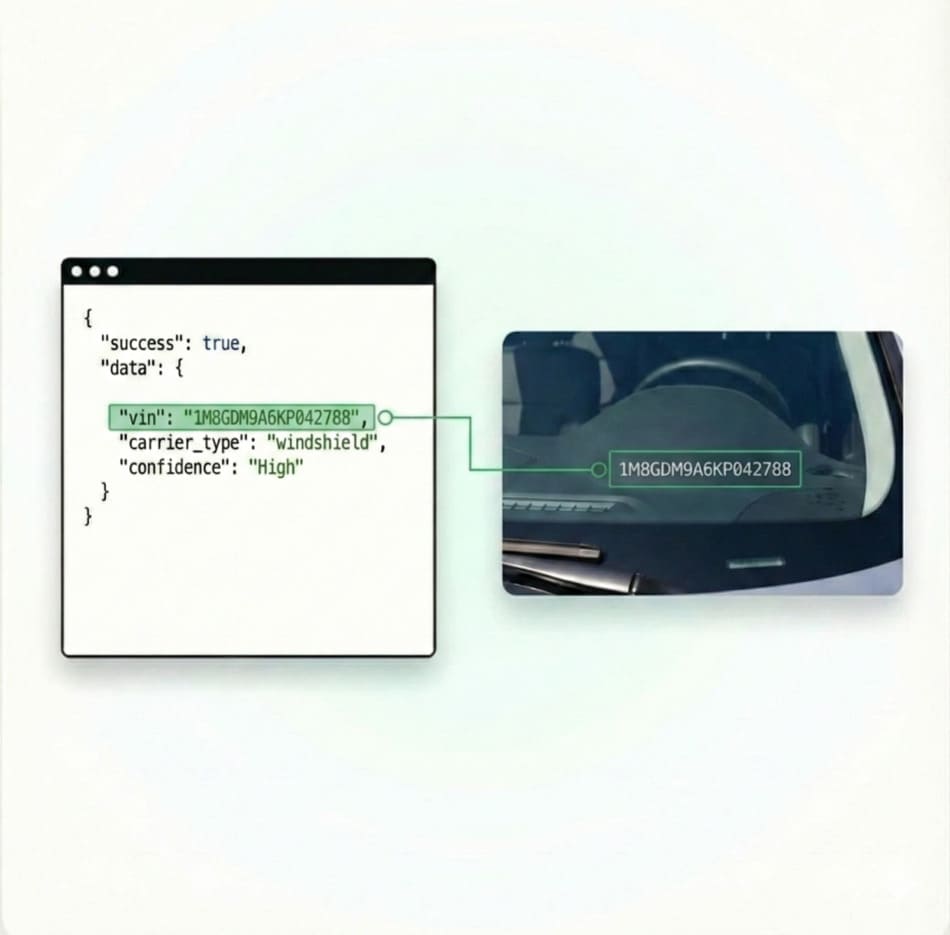
Low-Latency JSON Response
Optimized response payload designed for instantaneous logic evaluation at automated boom barriers.
{
"success": true,
"data": {
"vin": "WAUZZZ8T9AA012345",
"confidence": "High",
"carrier_type": "windshield"
}
}Frequently Asked Questions
Do we need specialized IR (Infrared) cameras?
No. While our API works perfectly with IR feeds, our advanced glare-reduction algorithms allow you to achieve high accuracy using standard high-definition IP cameras.
Can it read VINs on moving vehicles?
Yes, provided the camera's shutter speed is fast enough to eliminate severe motion blur. Our service is optimized for slow-rolling (under 10 mph) or stop-and-go checkpoint traffic.
What happens if a windshield is too dirty?
Our API makes a best-effort extraction even under severe conditions. Instead of failing with an error, it returns the recognized characters and flags the `confidence` score as 'Low'. Your system can use this confidence threshold to automatically trigger a manual review or route the vehicle to an inspection lane, without breaking your software's automated workflow.
More OCR Tutorials
Accelerate Auto Insurance Claims with VIN OCR API
Speed up First Notice of Loss (FNOL) and AI damage estimates. Learn how to extract accurate VINs from blurry, user-generated accident photos instantly.
How to Automate Auto Auction Intake with VIN Prefill
Learn how to eliminate manual data entry at auto auctions. Use our VIN OCR API to scan windshields and instantly prefill CRM systems in under 1 second.
C# Shipping Container OCR API
Tutorial: Learn how to use the StructOCR C# Client to extract data from Shipping Containers. Extract ISO 6346 container numbers with 99% accuracy. Includes code samples and JSON schemas.
C# Driver's License OCR API
High-accuracy C# Driver's License OCR API. Get structured JSON output from images, parse PDF417 barcodes, and eliminate manual entry errors.
Precise Data Extraction and Seamless
Integration with AI-powered OCR API.
Empower your solutions with automated data extraction by
integrating best-in class StructOCR via API seamlessly.
No credit card required • Full API access included